Немає товарів
Товар успішно додано до Вашого кошика
0 товарів у кошику. 1 товар у кошику.
Монтаж Nice Robus
Nice ROBUS - це лінія нереверсивних електромеханічних приводів для автоматизації розсувних воріт. Автоматика оснащена електронним блоком управління і роз'ємом для приймача радіоуправління SMXI , OXI, OXI-BD. OXI-LR. Підключення зовнішніх пристроїв було спрощено за допомогою технології «BLUEBUS», яка дозволяє підключити кілька пристроїв, використовуючи тільки 2 провода. ROBUS живиться від електромережі, а в разі відсутності напруги в електромережі автоматика може бути розблокована, з використанням спеціального ключа, для переміщення воріт вручну. В якості альтернативи, можна використовувати резервну батарею PS124, яка дозволяє виконувати деякі операції під час відсутності напруги в мережі. В лінійці Nice Robus наступні модифікації: Nice RB400, RB600, Rb1000 а також швидкісні модифікації RB250HS, RB500HS.

Таблиця 1. Порівняння основних характеристик електроприводів ROBUS
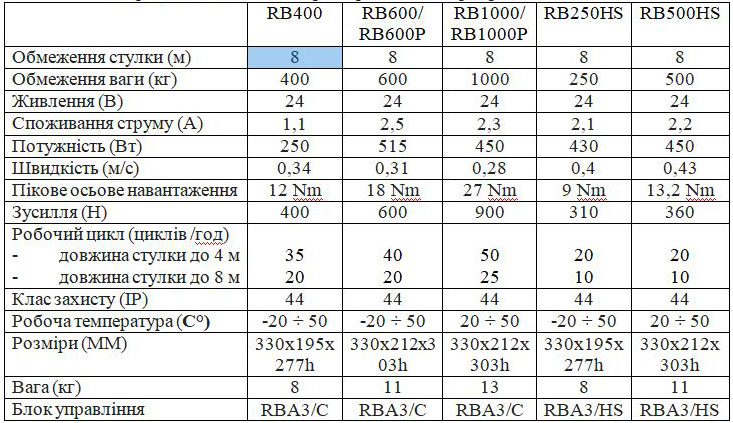
Примітка: 1кг. = 9,81Н, наприклад: 600Н = 61кг.
Типова система автоматики Nice Robus
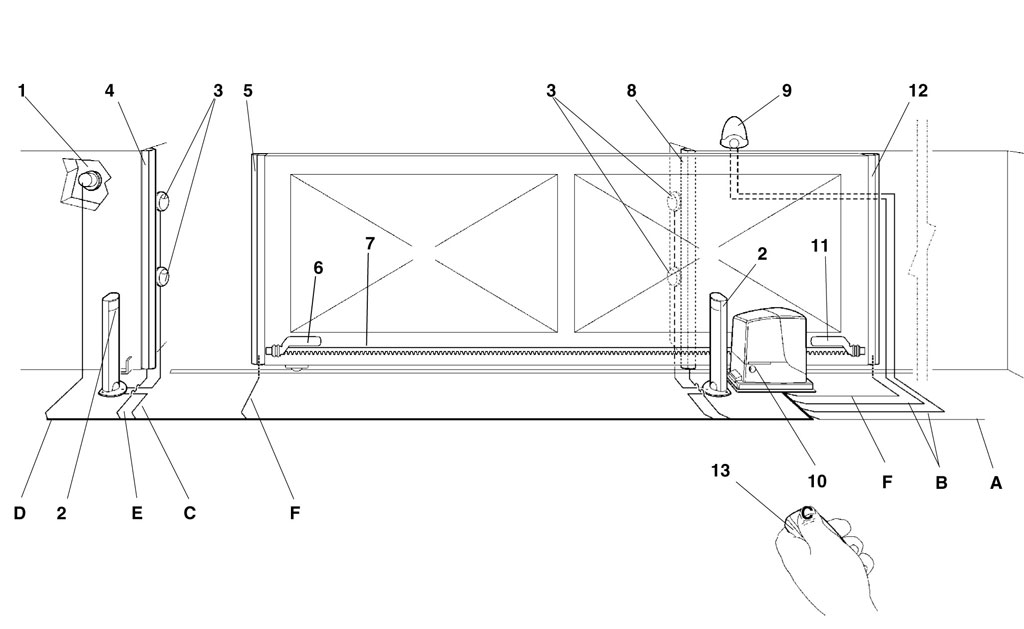
Мал.1
1 Ключ-вимикач
2 Фотоелементи на стійках
4 Чутлива кромка фіксована (додатково)
5 Чутлива кромка рухома
6 Кінцевий кронштейн «Відкрито»
7 Зубчаста рейка
8 Допоміжна чутлива кромка (додатково)
9 Проблискова лампа з вбудованою антеною LucyB
10 NICE ROBUS
11 Кінцевий кронштейн «Зачинено»
12 Допоміжна чутлива кромка (додатково)
Перелік електричнихї кабелів
На типовій системі, показаної на малюнку 2, показані кабелі, необхідні для підключення пристрою при типовому монтажі; в таблиці наводяться характеристики кабелів.
Кабелі, що використовуються повинні бути придатними для певного типу установки; наприклад, рекомендується кабель типу H03VV-F для кладки в критих приміщеннях, або H07RN-F - для зовнішньої кладки.
|
З’єднання |
Тип кабелю |
Максимально допустима довжина |
|
А: Електролінія живлення |
1 шт. кабель 3x1,5мм2 |
30 м. (примітка 1) |
|
В:Сигнальна лампа з антеною |
1 шт.кабель 2x0,5мм2 |
20 м. |
|
1шт.екранований кабель типу RG58 |
20 м. (рекомендується до 5м) |
|
|
С:Фотоелементи |
1 шт. кабель 2x0,5мм2 |
30 м. (примітка2) |
|
D:Ключ-вимикач |
2 шт. кабелю 2x0,5мм2 (примітка 3) |
50 м |
|
Е:Фіксовані кромки |
1 шт. кабель 2x0,5мм2 (примітка 4) |
30 м |
|
F:Рухомі кромки |
1 шт.кабель 2x0,5мм2 (примітка 4) |
30 м (примітка 5) |
Примітка 1: якщо кабель електроживлення довше 30м, потрібно кабель з великим перерізом, наприклад, 3x2,5мм2 і необхідна система заземлення поблизу системи автоматизації.
Примітка 2: якщо кабель «BLUEBUS» довше 30м (максимально 50м), необхідний кабель 2x1мм2.
Примітка 3: два кабелі 2x0,5мм2 можуть бути замінені на один кабель 4x0,5мм2.
Примітка 4: при наявності більше однієї кромки.
Примітка 5: для з'єднання рухомих кромок на розсувних стулках, необхідно використовувати спеціальні пристрої, які дозволяють з'єднувати два рухомих пристрої.
Перед монтажем автоматики необхідно провести попередню перевірку. Зокрема, потрібно перевірити комплектацію обладнання та впевнитись, що немає жодних механічних пошкоджень. Конструкція воріт дозволяє встановити автоматику, а вага та розміри стулки не перевищують допустимі показники (див. табл.1). Переконатись, що зусилля, необхідне для початку руху стулки, менше половини «номінального зусилля»; рекомендується рівень зусилля 50%, оскільки несприятливі кліматичні умови можуть значно збільшити тертя. Також необхідно переконатися, що при закриванні і відкриванні воріт немає точок з великим тертям. Спеціаліст із монтажу повинен виключити можливість падіння або виходу стулки з направляючої. Перевірити, що механічні обмежувачі досить міцні і немає ніякого ризику їх деформації, навіть в тому випадку, якщо стулка сильно вдаряється об них при русі. Стулка воріт повинна бути збалансованою, тобто залишатися нерухомою у будь-якому положенні. Також потрібно переконатися, що місце установки блоку захищено від затоплення водою. В разі ризику, необхідно підняти електропривід на необхідну відстань від землі.
Область монтажу повинна дозволяти розблокувати автоматику вручну легко і безпечно, без перешкод. Точки установки пристроїв повинні знаходитися в безпечних зонах, захищених від ударів і з досить міцними поверхнями.
Зберігати деталі ROBUS необхідно подалі від джерел загорання і тепла, потенційно вибухонебезпечних місць, зокрема, де містяться кислоти і солі. Уникати занурення деталей системи автоматизації в воду або інші рідини. Дані ситуації можуть пошкодити деталі автоматики і викликати інші несправності або небезпечні ситуації.
У разі воріт з внутрішньої хвірткою або в зоні переміщення полотна стулки, переконатися, що вона не обмежує нормальний рух полотна і при необхідності встановити відповідне блокування. Підключити блок управління до лінії електроживлення, обладнаної заземленням. Лінія електроживлення повинна бути захищена відповідним термомагнітним і диференціальним пристроєм. На лінії електроживлення повинно бути встановлено пристрій відключення від електричної мережі (з категорією перенапруги III, тобто відстань між контактами має бути не менше 3,5 мм) або еквівалентна система, наприклад, вилка з відповідною розеткою. якщо пристрій відключення від електричної мережі встановлено не поблизу системи автоматизації, необхідно передбачити систему блокування, що запобігає випадковому або несанкціонованому ввімкненню.
Монтаж автоматики Nice
Якщо є поверхня установки, електропривід повинен бути закріплений безпосередньо до неї з використанням відповідних матеріалів, наприклад, анкерних болтів, що розширюються. В іншому випадку, для установки автоматики необхідно виконати наступне:
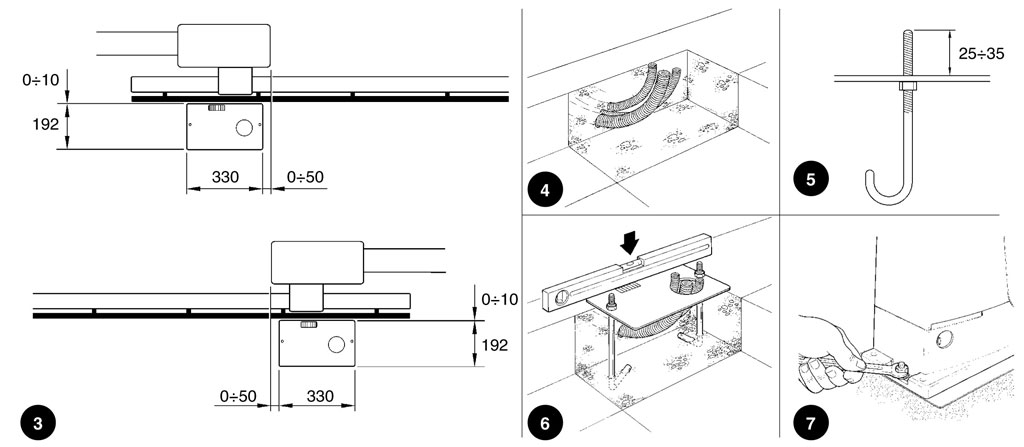
1. Вирити яму відповідних розмірів під фундамент.
2. Підготувати один або більше кабелів, як показано на малюнку 4.
3. З'єднати два анкерних болта на опорній пластині, встановивши одну гайку внизу і іншу зверху пластини; гайка під пластиною повинна бути закручена, як показано на малюнку 5, щоб частина болта, що залишилась виходила приблизно на 25 ÷ 35 мм вище пластини.
4. Залити бетон і, перш ніж він почне тужавіти, встановити опорну пластину на відстані, як показано на малюнку 3; перевірити паралельність стулці і горизонтальність
(малюнок 6). Почекати, щоб бетон повністю затвердів.
5. Видалити 2 верхні гайки з пластини і потім установити електропривід; перевірити, щоб він був паралельний стулці, потім закрутити не до кінця дві гайки з 2 шайбами, що входять в комплект, як показано на малюнку 7.
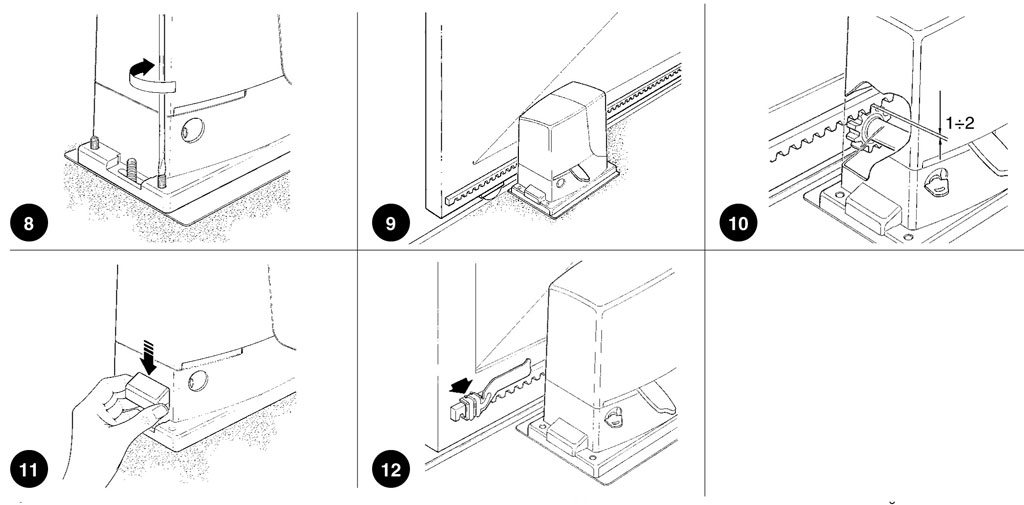
При наявності зубчастої рейки, по завершенні монтажу автоматики, за допомогою регулювальних гвинтів, як показано на малюнку 8, встановити шестерню ROBUS на необхідну висоту, залишивши зазор 1 ÷ 2 мм від зубчастої рейки. В протилежному випадку для установки зубчастої рейки потрібно:
6. Розблокувати електропривод, як показано в параграфі «Розблокування та переміщення вручну» глави «Інструкція і попередження для користувача електроприводу ROBUS ».
7. Повністю відкрити стулку і розмістити частину рейки на шестерні. Перевірити, щоб початок рейки відповідав початку стулки, як показано на малюнку 9. Перевірити, щоб між шестернею і зубчастою рейкою був зазор 1 ÷ 2 мм, потім закріпити рейку до стулки за допомогою відповідних пристосувань.
8. Пересувати стулку, використовуючи шестерню, як контрольну точку для закріплення інших елементів зубчастої рейки.
9. Відрізати зайву частину рейки.
10. Відкрити і закрити ворота кілька разів і переконатися, що зубчаста рейка вирівняна з центром шестерні з максимальною точністю 5 мм. Перевірити, щоб по всій довжині дотримувався зазор 1 ÷ 2 мм між шестернею і зубчатою рейкою.
11. Повністю затягнути гайки електроприводу, переконавшись, що він добре закріплений до основи; закрити гайки відповідними кришками, як показано на малюнку 11.
12. Установити два кінцевих кронштейна, як показано нижче (для версій RB600P і RB1000P встановити кронштейн згідно з параграфом «3.3 Установка кінцевих кронштейнів в версіях з індуктивним кінцевим вимикати отримувача»):
• Вручну перемістити стулку на відкривання на відстані не менше 2 - 3 см від механічного обмежувача.
• Перемістити кронштейн уздовж зубчастої рейки на відкривання до спрацювання кінцевого вимикача. Витягнути кронштейн на висоту не менше 2 см і потім заблокувати кронштейн відповідними регулювальними гвинтами до зубчастої рейки, як показано на
малюнку 12.
• Аналогічна операція повинна виконуватися для кінцевого вимикача на закривання.
13. Заблокувати електропривід, як зазначено в параграфі "Розблокування та переміщення вручну» глави «Інструкція і попередження для користувача».
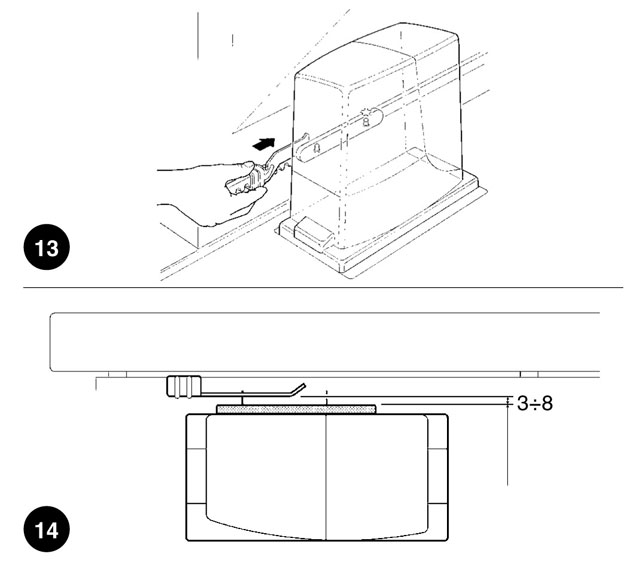
Установка кронштейнів у версії з індуктивним кінцевим вимикачем
Для версій RB600P і RB1000P, що використовують індуктивний кінцевий вимикач, необхідно закріпити кінцеві кронштейни наступним чином:
1. Вручну перемістити стулку на відстань не менше 2 - 3см від механічного обмежувача на відкривання.
2. Переміщати кронштейн уздовж зубчастої рейки в напрямку на відкривання, поки не вимкнеться відповідний світлодіод, як показано на малюнку 13. Висунути кронштейн на 2 см і потім закріпити його за допомогою відповідних гвинтів до зубчастої рейки.
3. Вручну перемістити стулку на відстань не менше 2 - 3см від механічного обмежувача на закривання.
4. Переміщати кронштейн уздовж зубчастої рейки в напрямку на закривання, поки не вимкнеться відповідний світлодіод. Висунути кронштейн на 2 см і потім закріпити його за допомогою відповідних гвинтів до зубчастої рейки
Для індуктивного вимикача оптимальна відстань від кронштейна знаходиться в межах 3 - 8 мм, як показано на малюнку 14.
Електричні з'єднання
Всі електричні з'єднання повинні виконуватися при відключеній від електромережі системи і від'єднаної резервної батареї.
1. Щоб зняти захисну кришку для отримання доступу до електронного блоку управління Nice ROBUS, необхідно зняти болт збоку і викрутити кришку, піднявши її вгору.
2. Видалити гумову мембрану, яка закриває отвір для проходу кабелів, і вставити всі сполучні кабелі різних пристроїв, залишаючи довжину 20 ÷ 30 см більше, ніж необхідно. Табл 5 для отримання більш докладної інформації по типу кабелю і малюнок 2 - по з'єднаннях.
3. Використовуючи зажим для збору кабелю, який входить в електропривід, розмістити зажим майже під отвором входу кабелю. У гумовій мембрані виконати отвір трохи менше, ніж діаметр зібраного кабелю, і потім вставити мембрану з кабелями в отвір для проходу кабелю. Встановити другий зажим для збору кабелів, трохи вище мембрани.
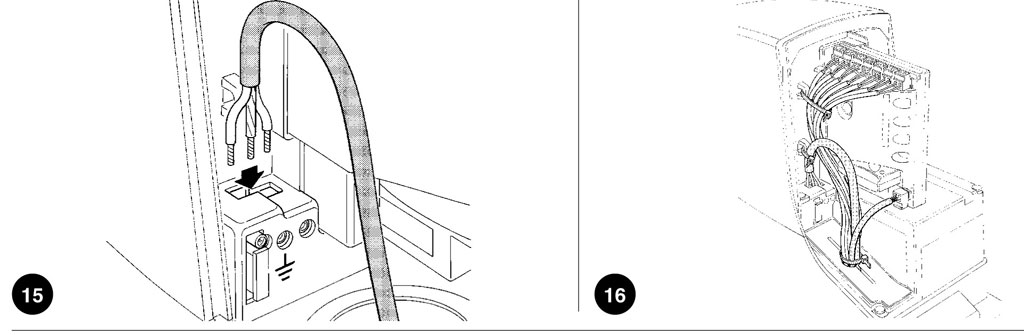
4. З'єднати кабель живлення з відповідними клемами, як показано на малюнку 15, потім зафіксувати кабель в першому кабельному кільці блоку за допомогою затиску.
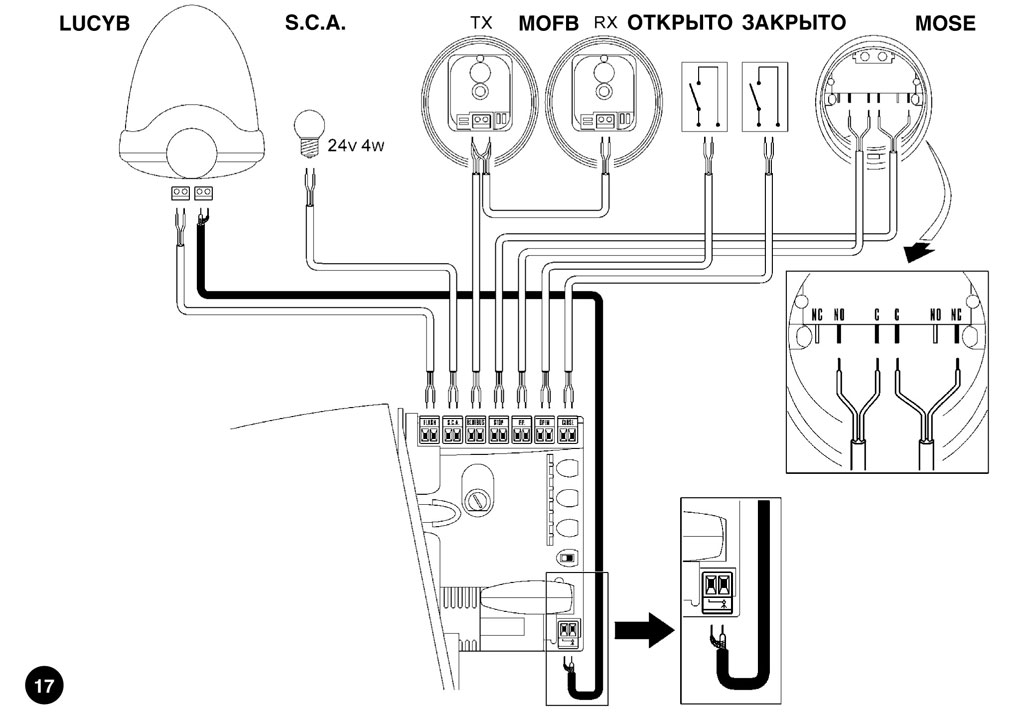
5. З'єднати інші кабелі за схемою, як показано на малюнку 17. Для полегшення процедури клеми знімні.
6. По завершенні виконання з'єднань, заблокувати зажимами зібрані кабелі до другого кабельного кільця блоку; зайва частина кабелю антени фіксується до інших кабелів за допомогою іншого затиску, як показано на малюнку 16.
Завершальна перевірка і запуск
Перед початком перевірки і запуску системи автоматизації рекомендується встановити стулку на половині ходу, щоб вона вільно пересувалася як при відкриванні, так і закриванні.
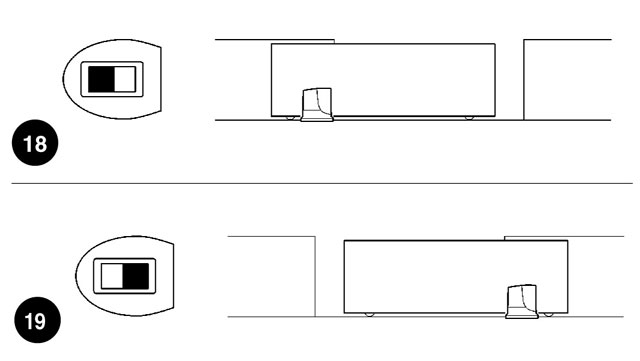
Вибір напрямку
Напрямок операції відкривання вибирається залежно від положення електроприводу щодо стулки. Якщо стулка рухається вліво необхідно перемістити перемикач вліво, як показано на малюнку 18, і якщо стулка повинна рухатися вправо необхідно перемістити перемикач вправо, як показано на малюнку 19.
Підключення електроживлення
Підключення електроживлення до ROBUS повинно проводитись кваліфікованим персоналом, що володіє достатнім досвідом, знаннями відповідно до чинного законодавства, стандартів і постанов.
Після подачі напруги на ROBUS рекомендується провести такі прості перевірки:
1. Упевнитися, що світлодіодний індикатор Nice BLUEBUS регулярно блимає з частотою приблизно один спалах в секунду.
2. Упевнитися, що світлодіодні індикатори на фотоелементах (як на TX, так і на RX) блимають; тип спалахів не має значення, оскільки він залежить від інших факторів.
3. Переконатися, що проблискова лампа, підключена до виходу FLASH і індикаторна лампа, підключена до виходу S.C.A., вимкнені.
Якщо вище перераховані умови не виконуються, необхідно негайно вимкнути електроживлення від блоку управління і уважно перевірити всі електричні з'єднання.
Розпізнавання пристроїв
Після подачі живлення блок управління повинен розпізнавати пристрої, підключені до входів BLUEBUS і СТОП. Перед цим світлодіодні індикатори L1 і L2 блимають, сигналізуючи про те, що необхідно зробити процедуру розпізнавання пристроїв.
1. Натиснути і утримувати кнопки [▲] і [Set].
2. Відпустити кнопки, коли світлодіодні індикатори L1 і L2 почнуть швидко блимати (приблизно через 3 сек.)
3. Почекати кілька секунд, поки блок управління завершить розпізнавання пристроїв.
4. Світлодіодний індикатор СТОП повинен залишатися включеним, поки не закінчиться процес розпізнавання, індикатори L1 і L2 вимикаються (потім L3 і L4 почнуть блимати).
Розпізнавання довжини стулки
Після розпізнавання пристроїв починають блимати світлодіодні індикатори L3 і L4. Це означає, що блок управління повинен визначити довжину стулки (відстань від кінцевого вимикача зачинення до кінцевого вимикача відкривання). Дана величина необхідна для розрахунку точки уповільнення і точки часткового відкривання.
1. Натиснути і утримувати натиснутими кнопки [Set] і [▼].
2. Відпустити кнопки після початку виконання операції (приблизно через 3 с.).
3. Перевірити, щоб почалася операція відкривання; інакше натиснути кнопку [Stop], щоб переглянути вимог параграфа «4.1 Вибір напрямку»; потім повторити операцію з пункту 1.
4. Почекати, поки блок управління завершить операцію відкривання до досягнення кінцевого вимикача відкривання; відразу ж після цього починається операція закривання.
5. Почекати, поки блок управління завершить операцію закривання.
Розпізнавання довжини стулки в режимі 2 для моделей 250HS і 500HS.
Дозволяє робити конфігурацію:
• I «Гальмування» при відкритті і закритті на відстані 10 см;
• «Установка швидкості двигуна» для відкриття і закриття на 100% (режим «вкрай швидко», табл 8).
Даний режим роботи активується під час фази розпізнавання пристроїв, для чого необхідно утримувати натиснутими кнопки [Стоп] і [Закрити] протягом більше 8 секунд. Після закінчення 8 секунд починають дуже швидко блимати світлодіоди L3 та L4; після цього можна відпустити кнопки [Стоп] і [Закрити].
Якщо вище перераховані умови не виконуються, необхідно негайно вимкнути електроживлення від блоку управління і уважно перевірити всі електричні з'єднання.
Перевірка руху воріт
Після розпізнавання довжини стулки рекомендується виконати кілька маневрів для перевірки правильного перемещення воріт.
1. Натиснути кнопку [Open] для виконання команди «Відкрити». Переконатися, що відкривання відбувається плавно без змін швидкості. Стулка повинна сповільнитися за 70 - 50см від кінцевого вимикача відкривання і зупинитися на відстані 2 ÷ 3 см від механічного кінцевого вимикача відкривання.
2. Натиснути кнопку [Open] для виконання команди «Закрити». Переконатися, що закривання воріт відбувається плавно без змін швидкості. Стулка повинна сповільнитися за 70 - 50см від кінцевого вимикача відкривання і зупинитися на відстані 2 ÷ 3 см від механічного кінцевого вимикача .
3. Протягом маневру перевірити, що проблискові лампа блимають з інтервалом 0,5 секунд. При наявності перевірити спалах лампи, підключеної до клеми S.C.A .: спалахи сповільнюються при відкриванні і прискорюються при закриванні.
4. Відкрити і закрити ворота, щоб упевнитися, що немає дефектів монтажу або регулювання або таких неполадок, як точки надмірного тертя.
5. Перевірити, що електропривід ROBUS, зубчаста рейка і кронштейни кінцевих вимикачів надійно закріплені, стійкі і мають достатню міцність навіть у випадку прискорення або уповільнення руху воріт.
Радіоприймач
Для дистанційного керування обладнанням Nice ROBUS на блоці управління обладнано роз'єм SM для радіоприймача типу SMXI або SMXIS, які доступні в якості додаткового обладнання.
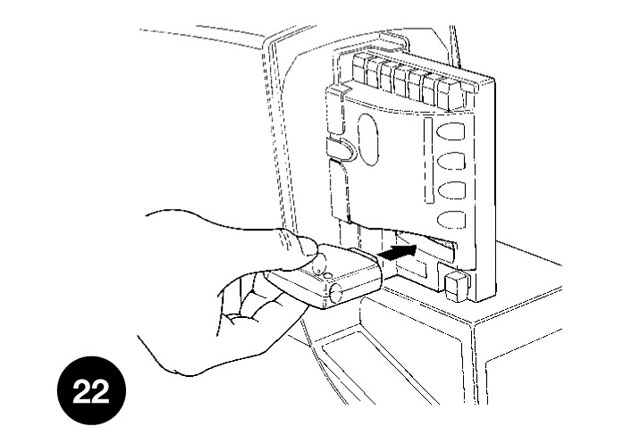
Для підключення радіоприймача необхідно виконати операцію, як показано на малюнку 22. У таблиці наводиться відповідність між виходами приймача і командами ROBUS:
|
Канал №1 |
Команда «Покроково» Покроковий режим |
|
Канал №2 |
Команда «Часткове відкриття» |
|
Канал №3 |
Команда «Відкрити» |
|
Канал №4 |
Команда «Закрити» |
Випробування і введення в експлуатацію
Це найбільш важливий етап при установці автоматичної системи для забезпечення найвищого рівня безпеки.
Випробування також можуть використовуватися для періодичної перевірки працездатності окремих пристроїв, що входять в систему автоматизації.
Кожен компонент системи автоматизації, наприклад, кромки безпеки, фотоелементи, аварійна зупинка та ін., вимагає специфічної процедури приймальних випробувань.
Приймальні випробування Nice ROBUS виконуються наступним чином:
Розблокувати електропривод. Переконатися, що стулка може переміщатися в напрямку
відкривання і закривання при прикладанні зусилля не більше 390Н (приблизно 40 кг). Заблокувати електропривод. Використовуючи пристрої управління і пристрої безпеки (ключ-вимикач або кнопки управління або радіо-передавачі), перевірити відкривання, закривання і зупинку воріт, пересвідчившись, що стулки переміщуються в потрібному напрямку. По черзі перевірити роботу всіх пристроїв безпеки, наявних в системі (фотоелементи, чутливі кромки, аварійна зупинка та ін.); перевірити, що ворота правильно виконують відповідну команду. Кожен раз, коли спрацьовує пристрій, на блоці управління світлодіодний індикатор «BLUEBUS» швидко блимає 2 рази на підтвердження, що блок управління визначає спрацьовування пристрою.
7. Якщо для мінімізації ризику виникнення небезпечних ситуацій, пов'язаних з переміщенням стулки, вжито заходів щодо обмеження зусилля при переміщенні, слід зробити вимір зусилля, як передбачається стандартом EN 12445. Якщо регулювання «Швидкість» та управління «Потужність двигуна» використовуються в якості допоміжного засобу для зменшення зусилля, пошукати і знайти регулювання, що забезпечують найбільш оптимальний результат.
Перекладено спеціально для сайту Vorota.rv.ua При копіюванні матеріалів посилання обов'язкове. Автоматика для воріт в м.Рівне.